理论 ¶
在之前的两个教程中,我们已经看到了卷积的应用实例。最重要的卷积之一是计算图像中的导数(或对它们的近似值)
为什么图像中的导数计算可能是重要的?让我们设想一下,我们要检测图像中存在的边缘。比如说:
 你可以很容易地注意到,在一个边缘,像素强度的变化是很明显的。一个表达变化的好方法是使用导数。梯度的高变化表示图像中的一个重大变化。
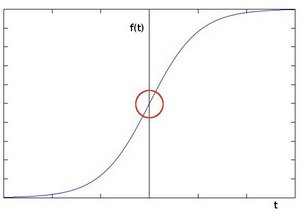
你可以很容易地注意到,在一个边缘,像素强度的变化是很明显的。一个表达变化的好方法是使用导数。梯度的高变化表示图像中的一个重大变化。为了更加形象,让我们假设我们有一个一维图像。在下面的图中,一个边缘由强度的 "跳跃 "来表示:
如果我们取第一个导数,可以更容易地看到边缘的 "跳跃"(实际上,这里出现的是一个最大值):
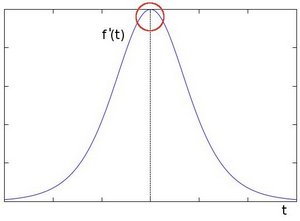
因此,从上面的解释中,我们可以推断出,检测图像中的边缘的方法可以通过定位梯度高于其邻居的像素位置(或者概括地说,高于一个阈值)来进行。
更详细的解释,请参考Bradski和Kaehler的《Learning OpenCV》。
Sobel 算子 ¶
- Sobel算子是一个离散的微分算子,它计算图像强度函数的梯度的近似值。
- Sobel算子结合了
Gaussian smoothing和微分。
Formulation ¶
假设要操作的图像为 :
- 我们计算两个导数:
- 水平变化:这是通过用奇数大小的内核 对 进行卷积计算的。例如,对于内核大小为 , 将被计算为:
- 垂直变化:这是通过用奇数大小的内核 对 进行卷积计算的。例如,对于内核大小为 , 将被计算为:
- 在图像的每一点上,我们通过结合上述两个结果计算出该点的梯度近似值:有时会使用以下更简单的方程式:
当核的大小为 时,上面显示的
Sobel核可能会产生明显的不准确(毕竟,Sobel只是一个导数的近似值)。OpenCV通过使用Scharr()函数来解决这种大小为 的核的不精确性。这和标准的Sobel函数一样快,但比它更准确。它可以实现以下内核
Code ¶
Explanation ¶
变量声明
// First we declare the variables we are going to use
Mat image,src, src_gray;
Mat grad;
const String window_name = "Sobel Demo - Simple Edge Detector";
int ksize = parser.get<int>("ksize");
int scale = parser.get<int>("scale");
int delta = parser.get<int>("delta");
int ddepth = CV_16S;加载图像
String imageName = parser.get<String>("@input");
// As usual we load our source image (src)
image = imread( samples::findFile( imageName ), IMREAD_COLOR ); // Load an image
// Check if image is loaded fine
if( image.empty() )
{
printf("Error opening image: %s\n", imageName.c_str());
return EXIT_FAILURE;
}消除噪声
// Remove noise by blurring with a Gaussian filter ( kernel size = 3 )
GaussianBlur(image, src, Size(3, 3), 0, 0, BORDER_DEFAULT);灰度化
// Convert the image to grayscale
cvtColor(src, src_gray, COLOR_BGR2GRAY);Sobel 算子
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
Sobel(src_gray, grad_x, ddepth, 1, 0, ksize, scale, delta, BORDER_DEFAULT);
Sobel(src_gray, grad_y, ddepth, 0, 1, ksize, scale, delta, BORDER_DEFAULT);- 我们计算 和 方向的 "导数"。为此,我们使用函数
Sobel(),如下所示。该函数需要以下参数:src_gray:在我们的例子中,输入的图像。这里是CV_8Ugrad_x / grad_y:输出图像。ddepth:输出图像的深度。我们将其设置为CV_16S以避免溢出。x_order: 方向上的导数顺序。y_order: 方向的导数顺序。scale:delta和BORDER_DEFAULT:我们使用默认值。
注意,在计算 方向的梯度时,我们使用:
xorder=1,yorder=0,我们对 方向进行类似的计算。
转换为CV_8U图像
// converting back to CV_8U
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);梯度
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);我们试图通过增加两个方向的梯度来近似计算梯度(注意,这不是一个精确的计算!但对我们的目的来说是好的)。
结果 ¶

References ¶
https://docs.opencv.org/4.5.5/d2/d2c/tutorial_sobel_derivatives.html